1. 单点选取
#include <pcl/io/pcd_io.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
typedef pcl::PointXYZRGBA PointT;
typedef pcl::PointCloud<PointT> PointCloudT;
// Mutex: //
boost::mutex cloud_mutex;
struct callback_args
{
// structure used to pass arguments to the callback function
PointCloudT::Ptr clicked_points_3d;
pcl::visualization::PCLVisualizer::Ptr viewerPtr;
};
void pp_callback(const pcl::visualization::PointPickingEvent& event, void* args)
{
struct callback_args* data = (struct callback_args *)args;
if (event.getPointIndex() == -1)
return;
PointT current_point;
event.getPoint(current_point.x, current_point.y, current_point.z);
data->clicked_points_3d->points.push_back(current_point);
// Draw clicked points in red:
pcl::visualization::PointCloudColorHandlerCustom<PointT> red(data->clicked_points_3d, 255, 0, 0);
data->viewerPtr->removePointCloud("clicked_points");
data->viewerPtr->addPointCloud(data->clicked_points_3d, red, "clicked_points");
data->viewerPtr->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 10, "clicked_points");
std::cout << current_point.x << " " << current_point.y << " " << current_point.z << std::endl;
}
void main()
{
std::string filename("bunny.pcd");
//visualizer
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("viewer"));
if (pcl::io::loadPCDFile(filename, *cloud))
{
std::cerr << "ERROR: Cannot open file " << filename << "! Aborting..." << std::endl;
return;
}
std::cout << cloud->points.size() << std::endl;
//viewer->addPointCloud(cloud, "bunny");
cloud_mutex.lock(); // for not overwriting the point cloud
// Display pointcloud:
viewer->addPointCloud(cloud, "bunny");
viewer->setCameraPosition(0, 0, -2, 0, -1, 0, 0);
// Add point picking callback to viewer:
struct callback_args cb_args;
PointCloudT::Ptr clicked_points_3d(new PointCloudT);
cb_args.clicked_points_3d = clicked_points_3d;
cb_args.viewerPtr = pcl::visualization::PCLVisualizer::Ptr(viewer);
viewer->registerPointPickingCallback(pp_callback, (void*)&cb_args);
std::cout << "Shift+click on three floor points, then press 'Q'..." << std::endl;
// Spin until 'Q' is pressed:
viewer->spin();
std::cout << "done." << std::endl;
cloud_mutex.unlock();
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
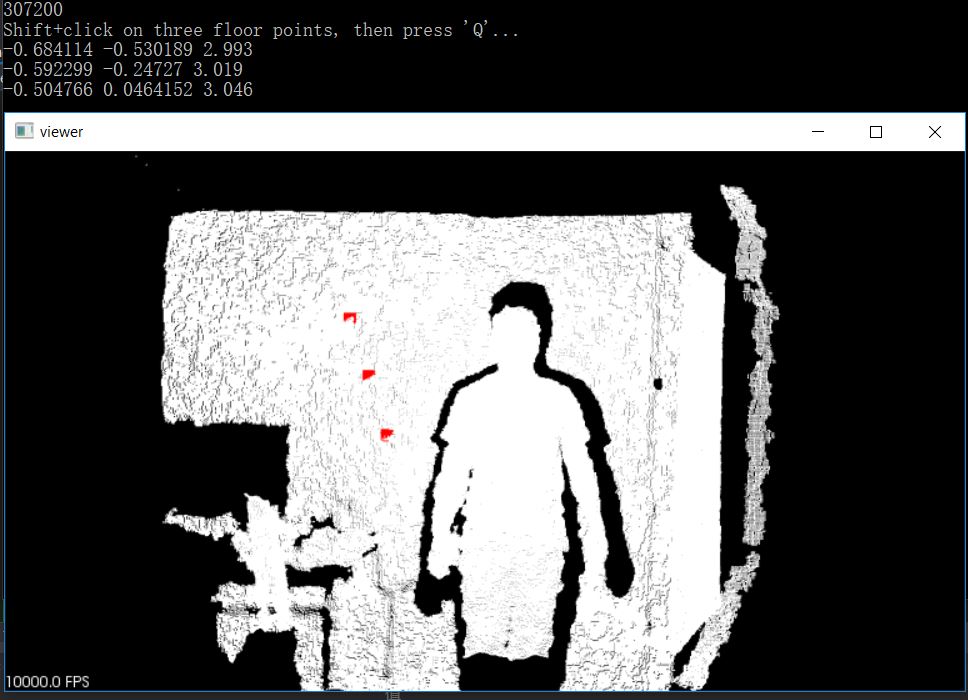
注意:点的选取,需要同时按住shift和鼠标左键
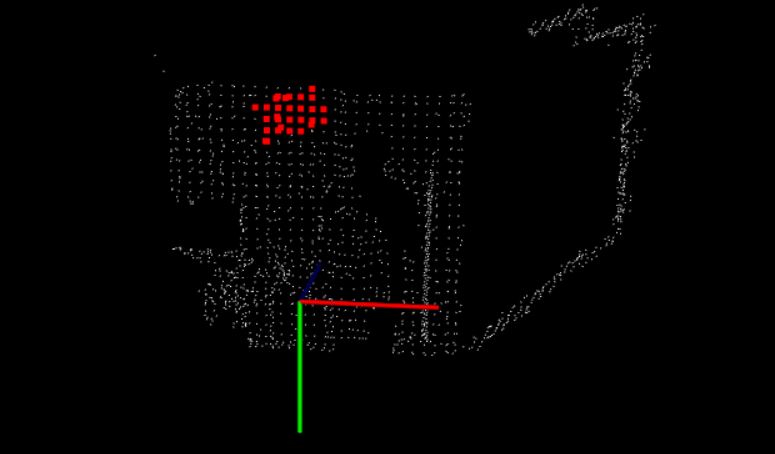
2. 区域选点
#include <pcl/io/pcd_io.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/voxel_grid.h>
#include <iostream>
#include <vector>
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("viewer"));
pcl::PointCloud<pcl::PointXYZ>::Ptr clicked_points_3d(new pcl::PointCloud<pcl::PointXYZ>);
int num = 0;
void pp_callback(const pcl::visualization::AreaPickingEvent& event, void* args)
{
std::vector< int > indices;
if (event.getPointsIndices(indices)==-1)
return;
for (int i = 0; i < indices.size(); ++i)
{
clicked_points_3d->points.push_back(cloud->points.at(indices[i]));
}
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> red(clicked_points_3d, 255, 0, 0);
std::stringstream ss;
std::string cloudName;
ss << num++;
ss >> cloudName;
cloudName += "_cloudName";
viewer->addPointCloud(clicked_points_3d, red, cloudName);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 10, cloudName);
}
void main()
{
if (pcl::io::loadPCDFile("bunny.pcd", *cloud))
{
std::cerr << "ERROR: Cannot open file " << std::endl;
return;
}
viewer->addPointCloud(cloud, "bunny");
viewer->setCameraPosition(0, 0, -2, 0, -1, 0, 0);
viewer->registerAreaPickingCallback(pp_callback, (void*)&cloud);
//VoxelGrid
pcl::VoxelGrid<pcl::PointXYZ> vgF;
vgF.setInputCloud(cloud);
vgF.setLeafSize(0.1, 0.1, 0.1);
vgF.filter(*cloud);
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}